



개요 및 필요성
내비게이션은 운전자에게 길을 보여주고, 막히는 곳을 피해 지름길을 알려주어 운전을 도와준다. 자율 주행 자동차는 내비게이션에서 보여주는 지도 정보만으로는 좌회전을 위해서 몇 개의 차선을 옮겨서, 얼마의 속도를 내야 하는지 알기 어렵다. 우회전 차선에 늘어선 차가 많으니, 미리 우회전 차선으로 옮겨가야겠단 판단을 위해, 또는 좌회전 차선이 몇 미터부터 생기는지, 좌회전 차선이 1과 2차선인지도 정보가 필요하다. 내비게이션의 경우 도심이나 고가도로 또는 경사의 도로를 표현하고 있지 않지만 자율 주행 자동차의 속도제어를 위해서는 필요하다.
뿐만 아니라, 보다 더 정확하게 복잡한 교차로와 같은 도로를 주행하기 위해서는 신호등의 위치나 표지판, 또는 랜드마크가 될 만한 도로 주변의 정보로부터 지원을 받아야 한다. 운전자도 간혹 간판의 불빛과 신호등 불빛이 혼돈되거나, 복잡한 교차로에서 어떤 신호등의 신호를 선택해야 하는지 혼란스러울 때가 있다. 내비게이션은 도심의 건물로 인해 복잡한 교차로에서 간혹 위치의 정확성이 낮아지는 경우가 있다. 운전자의 주변의 랜드마크 정보로부터 나의 위치를 유추할 수도 있다.
정밀지도는 자율 주행 자동차가 목적지로의 경로를 생성하고, 생성된 경로로 이동하도록 지속적으로 현재의 위치를 파악하고, 속도와 방향을 결정하는 데 중요한 역할을 한다.
정밀지도의 구성
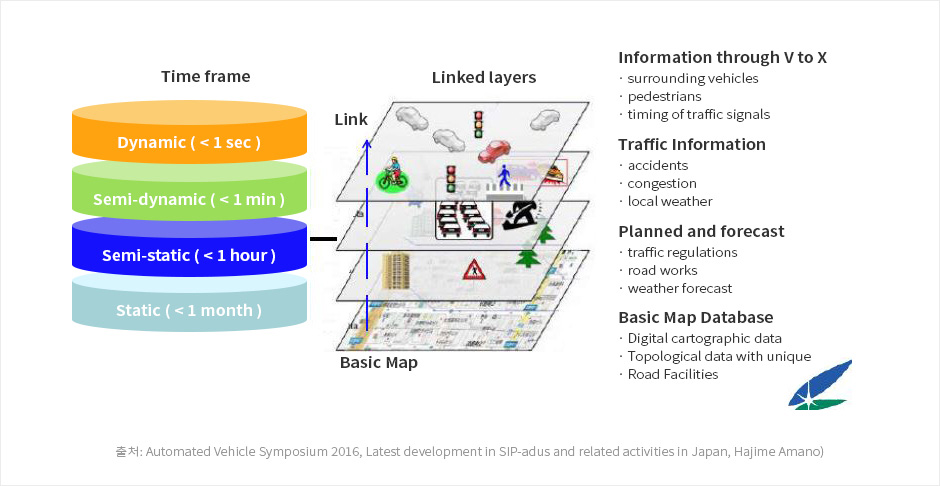
정밀지도는 실세계와 유사한 상세도 수준으로 생성하여 운전자에게 제공하거나, 도시계획 등의 목적에 활용할 수도 있다. 본 원고에서는 자율 주행 자동차가 위치를 정확하게 파악하여 운전자의 도움 없이 스스로 정해진 위치로의 이동을 지원하는 것을 목적한다. 자율 주행을 위한 정밀지도는 도로 면의 차선을 포함하는 노면의 표식, 노변의 교통표지, 교통신호등 등의 위치정보와 도로의 경사 및 구배 등을 검출한다. 비교적 시간의 변화에 민감하지 않은 정보이며, 매시간, 매분, 또는 매초 단위로 갱신해야 하는 정보들은 각각의 레이어를 구분하여 저장하고 관리한다.
예측 가능하거나 정해진 교통관련 정보들, 즉 기상예보나, 도로공사, 교통법규 등이 상위 계층에 속하며, 차 상위 계층에는 일시적인 도로 점유와 같은 정보, 교통사고 및 교통정체, 지역적 기상 등의 정보가 포함된다. 최상위 계층에는 일시적인 보행자, 교통신호주기 등등의 정보를 관리하기도 한다. 자율 주행 자동차의 경로 생성 서비스를 위해서는 출발지와 목적지를 선택하는 레이어가 요구된다. 이를 위하여 내비게이션 데이터를 활용하는 것도 가능하다.
정밀지도의 구성과 관련하여 각 나라 또는 연구자마다 약간의 차이는 있으나, 표준이 필요한 부분에 대해 융합할 필요성이 강조되고 있다. 최근에는 기존에 존재하는 다양한 사실상 표준이었던 NDS, ADASIS forum, SENSORIS 등이 함께 정보를 공유하고자 Open Autodrive Forum을 통해 35개의 회사가 참여하고 있다. 또 다른 맵 표준은 유럽 표준화 기구(ETSI) 에서 정의한 LDM(Local Dynamic Map)이 있다.
정밀지도 프로슈머(생산과 소비) 프로세스
기존의 정밀지도 제작 기술은 대부분 이동형 측량 시스템(MMS:Mobile Mapping System)을 사용하여 차량 등에 GPS, 레이저스캐너, 카메라 등의 센서를 장착하고 이들로부터 수집된 데이터를 가공하여 지도제작, 도로관리, 시설물 관리 등의 목적으로 활용되었다. 본 원고에서는 정밀지도를 생성하는 또 다른 방법으로 커넥티드 스마트자동차를 이용한 클라우드 기반의 크라우드 소싱이라는 정밀지도 생성 프로세스를 소개한다.
차량의 내외부 통신망에 연결된 커넥티드 스마트자동차는 다양한 센서를 장착하여 주변의 정보를 수집하여 장애물이나 차선 등을 검출한다. 검출된 데이터는 운전자가 안전 운전을 하도록 소비된 다음 버려지고 있다. 이러한 데이터들을 클라우드 분산 컴퓨팅 시스템에서 수집하여 가공한다면, 광범위 영역에 대한 차선 정보 등을 포함한 정밀지도 생성이 가능해진다.
커넥티드 스마트자동차가 주행하는 곳이면, 어디든지 수집하여 최신의 도로환경 데이터가 후행하는 자동차로 제공되는 데이터 프로슈머와 공유 개념의 정밀지도가 생성된다. 수집된 데이터가 많을수록 정확성은 높아지고, 수집 영역 또한 점점 확대되는 크라우드 소싱 형태이다. 이러한 정밀지도 프로세스에서는 클라우드 서버로의 대용량 데이터 전송을 위한 통신 대역폭의 향상이 필요하며, 클라우드 서버에서는 기존의 정밀지도와 수집된 데이터의 일치하는 부분을 찾아 갱신함에 있어서 데이터의 신뢰성도 고려되어야 한다.
또한 악의적으로 데이터를 생성하는 경우를 선별하는 과정이 필수적으로 요구된다. 뿐만 아니라, 정밀지도 영역이 확장됨에 따른 데이터 관리 체계의 표준과 플랫폼이 개발되어, 다양한 서비스와 사용자에게 하나의 단일화된 형태로 정밀지도 제공이 가능해진다.
향후 연구계획
자율 주행 기술은 초기, 군사적 목적에서 시작하여, 지금은 일상생활에서 이동이 필요할 때 자율주행 자동차를 호출하여 목적지로 이동하는 서비스로 구현되어 가까운 미래에 나타날 것이 예견되고 있다. 운전자가 없는 택시, 운전자가 없는 셔틀버스, 운전이 힘들 때 잠깐 운전을 대신하는 운전지원시스템 등 다양한 자율 주행 기술이 안전한 이동을 제공하려 한다. 이러한 자율 주행 기술은 운전자의 손과 발이 되는 전자제어시스템과 전방을 주시하고 속도를 줄이거나 서거나 피해서 돌아가야 하는가를 결정하는 인식과 판단 시스템으로 구성되어 있다.
전자제어시스템은 보다 안전하고 정밀하게 조작하는 것을 연구하고, 인식과 판단 시스템에서는 빠르고 정확하게 길을 찾고 탑승자를 안전하게 보호하기 위해 다른 이동체와의 조화를 이루기 위한 결정을 내려야 한다. 정밀지도는 이러한 자율 주행 서비스를 위해 정확하게 위치를 찾아내고 주행 중 발생하는 상황을 결정하는 기본 정보로서 활용가능하다.
차 영상센서를 비롯한 다양한 안전운전 지원용 센서가 장착된 차량이 증가하게 되어 점차 많은 양의 데이터가 수집되고 이를 활용한 정밀지도는 점점 다양한 정보가 더 정확한 좌표값을 가지게 될 것으로 기대한다.
클라우드 기반 자율 주행 정밀지도 프로슈머(생산과 소비) 서비스 개념도
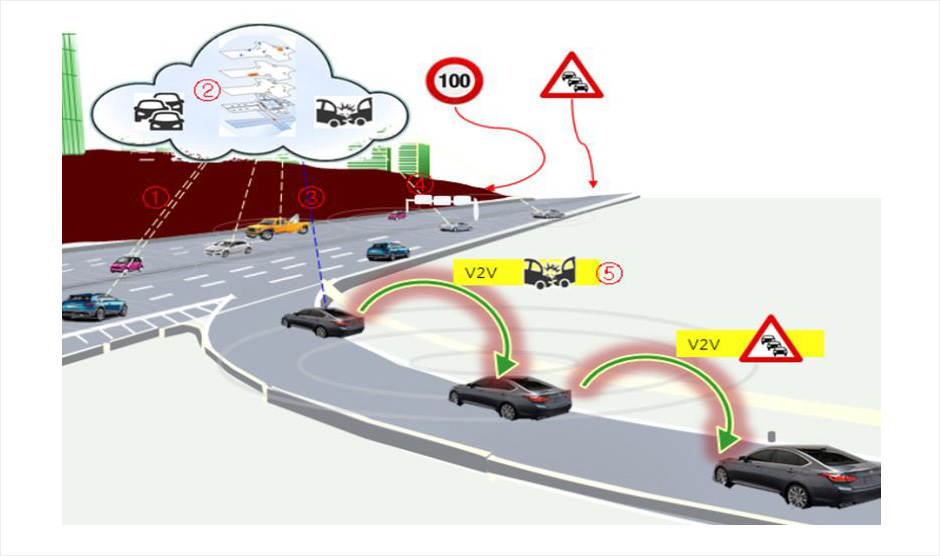
- 1) 영상센서 기반의 비교적 장시간 동안 변화하지 않는 정적인 속성 정보를 차량에서 수집하여 클라우드 센터로의 전달하는 단계
- 2) 클라우드에서는 제공된 데이터의 신뢰성을 판단하고 최신의 자율 주행 맵으로 상세화 단계
- 3) 클라우드에서는 데이터를 요청하는 차량에게 상세화된 부분 자율 주행 맵을 제공하는 단계
- 4) 부분 맵을 전달받은 차량은 안전한 이동을 위해 사용하고, 새로이 수집된 정보는 최신의 자율주행 맵을 갱신하기 위해 클라우드 서버로
전달하는 단계로서 2)의 과정이 반복됨 - 4) 부분 맵을 전달받은 차량은 안전한 이동을 위해 사용하고, 새로이 수집된 정보는 최신의 자율주행 맵을 갱신하기 위해 클라우드 서버로 전달하는 단계로서 2)의 과정이 반복됨
- 5) 활용 측면에서는 차량 간 전방 장애물이나 소통 정보에 대해 실시간으로 정보를 전달받을 수 있음
자율 주행을 위한 정밀지도 레이어 구분 예
- 최정단
- 전자통신연구원 실장

-
미래 자동차
클라우드 기반의 전자지도

-
미래 자동차
스마트 모빌리티 허브