



자율주행자동차(Automated Vehicles)는 본래 10여 년 전부터 자동차제작사(OEM)들 주도로 주로 고급차량에 적용되어온 자동주행지원시스템(Autonomous Functions) 기반으로 점진적인 기술진화(Evolution) 과정을 거치면서 시장에 도입되었다. 그러나 약 5년 전, 구글이 자율주행자동차 개발 상용품의 일반도로 주행시험 내용을 전세계 언론에 공개하면서, OEM 중심의 자율주행자동차 기술의 진화과정이 정보통신기술(ICT) 업계를 중심으로 기술혁신(Revolution) 과정으로 수년 내에 시장에 도입될 수 있다는 가능성이 현실화되었다.
여기에 최근 전기자동차 선두업체인 테슬라(Tesla)가 혁신적인 자율주행기능을 테슬라 전기차 모델에 적용해 시험주행과 사고를 기록한 내용이 보도되면서, 자율주행자동차는 이제 전기자동차와 융합되는 방향으로 정립되고 있다. 결국 OEM 중심의 기존 자동차에 미국교통안전청(NHTSA)과 자동차공학회(SAE)에서 제시한 자율주행자동차의 레벨(Level) 2, 3, 4가 점진적으로 진화하면서 시장에 도입되는 방향과, ICT 업계 중심의 전기차 기반 자율주행자동차의 Level 3 혹은 4를 달성하는 기술혁신 과정이 당분간 공존하면서 경쟁할 것이라는 진단이 지배적이다.
미국 NHTSA와 SAE의 자율주행 기술단계
| 구분 | Level 0 | Level 1 | Level 2 | Level 3 | Level 4 | Level 5 |
|---|---|---|---|---|---|---|
| NHTSA | No Automation | Function Specific Automation | Combined Function Automation | Limited Self-Driving Automation | Full Self-Driving Automation | - |
| SAE | No Automation | Driver Assistance | Partially Automation | Conditional Automation | High Automation | Full Automation |
미국교통부(USDOT)에서는 차량-도로간 통신(Vehicle to Infrastructure: V2I)기능과 차량-차량간 통신(Vehicle to Vehicle: V2V) 기능을 차량에 부여하는 Connected Vehicle (CV) 기능이 Automated Vehicle (AV) 기능으로 발전하는 모습을 개념적으로 정의하고 있다. 즉, 자동차 제작사가 추진하는 차량의 독립적인 자동주행기능인 Autonomous Vehicle 개념과 DOT 등 도로관리기관이 추진하는 CV 개념을 융합하여 Connected Automated Vehicle (CAV) 기능을 구축하는 것이 미국교통안전청(NHTSA)의 Level 2를 뛰어넘어 궁극적으로 Level 3 및 Level 4를 달성하는 필요충분조건으로 규정하고 있는 것이다.
미국은 2030년을 목표로 CV와 AV를 융합한 CAV를 구현하기 위해 2010년부터 추진한 Safety Pilot 프로젝트의 결과를 기반으로 CV Pilot 프로젝트를 2015년부터 연차적으로 구현하여 확산하는 전략을 발표했고, 이미 많은 예산을 반영하고 있다. 또한 이와 병행해서 자율주행시스템에 대한 기술타당성 검토, 비용효과분석, 빅데이터 운영관리, 정보보안, 기술표준화, 인간공학연구, 성능시험 및 평가 등 기본적인 기술정책연구 추진을 시작하고 있다.

독일을 비롯한 유럽연합(EU)은 자동차제작사 및 부품사를 중심으로 자율주행시스템 구현 전략을 수립하고, 이에 대한 기술 및 상용화 로드맵을 제시하였다. 특히 독일의 연방도로공단(BASt)에서 미국교통안전청(NHTSA)에 대응하여 제시한 기술단계에 따라 세계 최고의 자동차부품회사인 BOSCH와 차량제작사인 BMW에서 제품화 전략을 제시하였다. 즉, EU는 독일의 자동차사 및 부품회사를 중심으로 2025년 후반에 역시 Level 4를 위한 상용제품을 출시할 것으로 보인다. 그러나 Level 3 및 Level 4는 도로의 첨단기능이 지원되지 않으면 상용제품의 출시가 가능하지 않다는 제약조건을 포함하고 있고, BMW 등은 도로관리기관들에게 자율주행기능을 위한 도로부문의 기술요구조건을 명확히 제시하고 있다.
이를 위해 도로가 지능화되어야 한다. 즉, 스마트도로 기능을 확보해야 하는 것이다. 지난 20여 년간 전세계적으로 도로관리자나 도시교통운영자들은 지능형교통체계(Intelligent Transport Systems, ITS)를 적용하여 도로에서 차량의 흐름에 대한 정보를 수집하여 분석하고 이를 시민들에게 정보로 제공하였다. 그러나 최근 차량이 개별적으로 주행하고 있는 도로와 통신하고, 또한 주변차량과 서로 통신하는 V2X 기반의 CV 기술이 시장에 도입되면서, 이제 정보를 수집하고 제공하는 주체가 더 이상 도로관리자나 도시교통관리자가 아닌 시대가 되었다.
독일을 비롯한 유럽연합(EU)은 자동차제작사 및 부품사를 중심으로 자율주행시스템 구현 전략을 수립하고, 이에 대한 기술 및 상용화 로드맵을 제시하였다. 특히 독일의 연방도로공단(BASt)에서 미국교통안전청(NHTSA)에 대응하여 제시한 기술단계에 따라 세계 최고의 자동차부품회사인 BOSCH와 차량제작사인 BMW에서 제품화 전략을 제시하였다.
즉, EU는 독일의 자동차사 및 부품회사를 중심으로 2025년 후반에 역시 Level 4를 위한 상용제품을 출시할 것으로 보인다. 그러나 Level 3 및 Level 4는 도로의 첨단기능이 지원되지 않으면 상용제품의 출시가 가능하지 않다는 제약조건을 포함하고 있고, BMW 등은 도로관리기관들에게 자율주행기능을 위한 도로부문의 기술요구조건을 명확히 제시하고 있다.
이를 위해 도로가 지능화되어야 한다. 즉, 스마트도로 기능을 확보해야 하는 것이다. 지난 20여 년간 전세계적으로 도로관리자나 도시교통운영자들은 지능형교통체계(Intelligent Transport Systems, ITS)를 적용하여 도로에서 차량의 흐름에 대한 정보를 수집하여 분석하고 이를 시민들에게 정보로 제공하였다. 그러나 최근 차량이 개별적으로 주행하고 있는 도로와 통신하고, 또한 주변차량과 서로 통신하는 V2X 기반의 CV 기술이 시장에 도입되면서, 이제 정보를 수집하고 제공하는 주체가 더 이상 도로관리자나 도시교통관리자가 아닌 시대가 되었다.
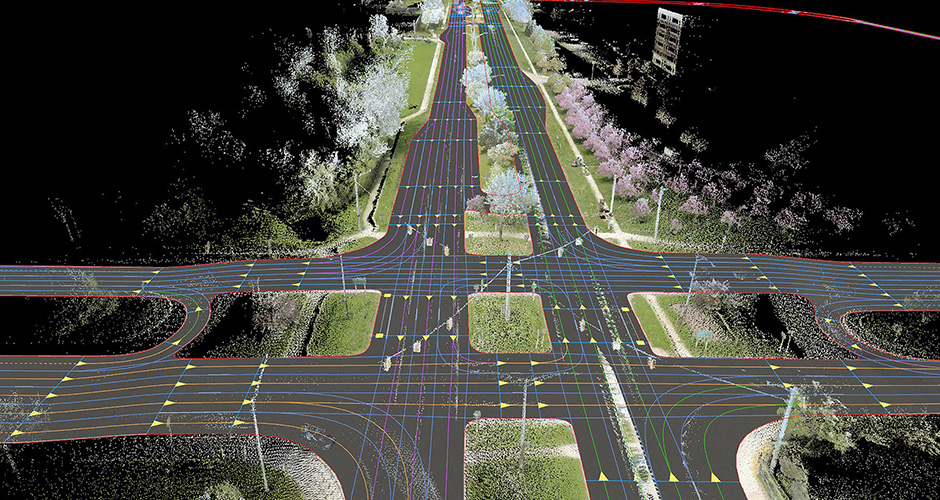
전기자동차 및 자율주행자동차 등 미래형 자동차에는 이런 CV 기능이 필수적으로 장착되어야 주행시 차량의 사고 가능성을 예방하여 탑승자의 안전을 보장한다. 도시 내의 도로와 자동차 전용도로 모두 이러한 Connected 기능을 갖추어야 미래 스마트도로로의 전환이 가능하다. 이를 위해 각종 고기능 센서들을 도로에 설치하여 도로의 물리적인 기하구조 정보를 디지털 인프라 정보로 전환하고, 고정밀 맵 기반의 위치측위 정보를 주행하는 차량들에게 실시간으로 전달해야 한다. 동시에 해당 구간의 도로에 주행하고 있는 차량들의 정보를 파악하여 안정적인 주행상태를 유지하고 있는지, 혹은 주변차량과 주행상 상충(Conflict) 문제로 혼잡이나 사고 가능성은 없는지 등을 모니터링하고 필요시 즉각적인 대응이 가능하도록 해야 한다. 즉, 도로와 차량, 차량과 차량은 소위 디지털 기반의 사물인터넷(IoT) 환경으로 바뀌어 초당 10회 이상의 간격으로 정보를 주고받아 서로를 인식하면서 학습하고, 이를 통해 사고와 혼잡이 발생할 수 있는 상황이 만들어지지 않도록 해야 한다. 이것이 지금부터 도로교통 분야에서 준비해야 할 인공지능, 즉 AI가 지배하는 스마트도로 개념이다.
인공지능 기반의 자율주행을 추진하는 또 하나의 방향이 있다. 자율주행차량이 고속 주행시 운전자를 지원하는 것이 아닌, 오히려 도심에서 저속상태로 운전자없이 주행하면서 여러 사람을 실어 나를 수 있는, 소위 무인셔틀버스 형태로 추진되고 있는 것이다. 미국이나 유럽 그리고 일본에서는 현재 스마트시티 프로젝트 추진에 가장 핵심적인 요소로 주요 대중교통 승하차장에서 최종 목적지까지 자가용 없이 연결할 수 있는 서비스를 제시하고 있다. 최근 미국교통부(USDOT)가 경합을 통해 스마트시티 실증사업 대상지로 최종 선정한 오하이오주 Columbus시에서 추진할 계획인 무인자율주행셔틀버스가 그 대표적인 예다. 결국 이는 자가용 이용기반 도로주행 수요 중심의 도시교통체계 전반을 자율주행 기술이 이끄는 공유형 친환경 수단 기반 통합모빌리티(Mobility Integration) 개념으로 전환하는 새로운 교통체계 시대가 도래했음을 의미한다.
전기자동차 및 자율주행자동차 등 미래형 자동차에는 이런 CV 기능이 필수적으로 장착되어야 주행시 차량의 사고 가능성을 예방하여 탑승자의 안전을 보장한다. 도시 내의 도로와 자동차 전용도로 모두 이러한 Connected 기능을 갖추어야 미래 스마트도로로의 전환이 가능하다. 이를 위해 각종 고기능 센서들을 도로에 설치하여 도로의 물리적인 기하구조 정보를 디지털 인프라 정보로 전환하고, 고정밀 맵 기반의 위치측위 정보를 주행하는 차량들에게 실시간으로 전달해야 한다.
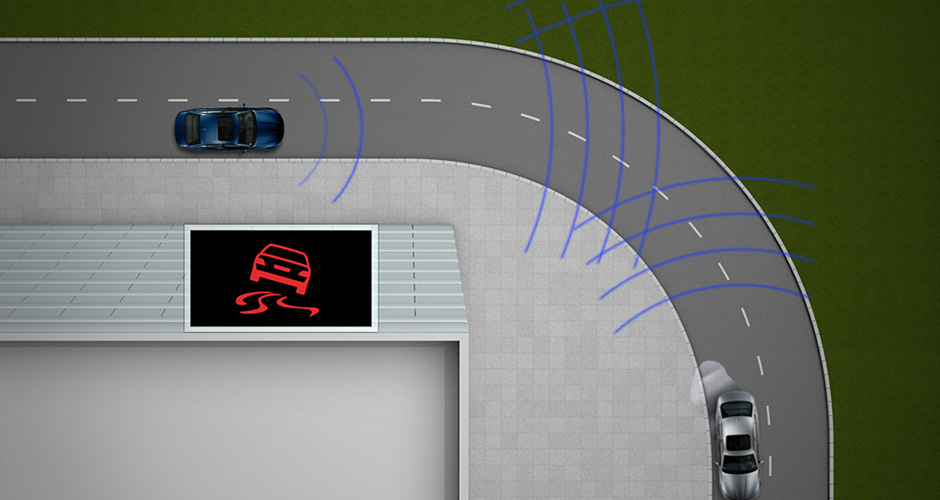
동시에 해당 구간의 도로에 주행하고 있는 차량들의 정보를 파악하여 안정적인 주행상태를 유지하고 있는지, 혹은 주변차량과 주행상 상충(Conflict) 문제로 혼잡이나 사고 가능성은 없는지 등을 모니터링하고 필요시 즉각적인 대응이 가능하도록 해야 한다. 즉, 도로와 차량, 차량과 차량은 소위 디지털 기반의 사물인터넷(IoT) 환경으로 바뀌어 초당 10회 이상의 간격으로 정보를 주고받아 서로를 인식하면서 학습하고, 이를 통해 사고와 혼잡이 발생할 수 있는 상황이 만들어지지 않도록 해야 한다. 이것이 지금부터 도로교통 분야에서 준비해야 할 인공지능, 즉 AI가 지배하는 스마트도로 개념이다.
인공지능 기반의 자율주행을 추진하는 또 하나의 방향이 있다. 자율주행차량이 고속 주행시 운전자를 지원하는 것이 아닌, 오히려 도심에서 저속상태로 운전자없이 주행하면서 여러 사람을 실어 나를 수 있는, 소위 무인셔틀버스 형태로 추진되고 있는 것이다. 미국이나 유럽 그리고 일본에서는 현재 스마트시티 프로젝트 추진에 가장 핵심적인 요소로 주요 대중교통 승하차장에서 최종 목적지까지 자가용 없이 연결할 수 있는 서비스를 제시하고 있다.
최근 미국교통부(USDOT)가 경합을 통해 스마트시티 실증사업 대상지로 최종 선정한 오하이오주 Columbus시에서 추진할 계획인 무인자율주행셔틀버스가 그 대표적인 예다. 결국 이는 자가용 이용기반 도로주행 수요 중심의 도시교통체계 전반을 자율주행 기술이 이끄는 공유형 친환경 수단 기반 통합모빌리티(Mobility Integration) 개념으로 전환하는 새로운 교통체계 시대가 도래했음을 의미한다.
- 문영준
- 한국교통연구원 교통기술연구소장

-
미래 자동차
클라우드 기반의 전자지도

-
미래 자동차
스마트 모빌리티 허브