



최근 몇 년간 자율주행 기술은 비약적인 발전을 거듭해오고 있다. 자율주행 기술은 이제 단순히 차량을 자동으로 주행하는데 그치지 않고 자동차와 커넥티드, 인공지능, 빅데이터 등의 기술 융합으로 이동 중 공간과 시간의 가치를 재생산하는 모빌리티 융합서비스-신산업으로 변화하고 있다.
선진국에서는 산업융합 생태계 조성과 새로운 교통수단 가치를 창출하기 위해 대중교통용 셔틀서비스와 자율주행택시, 카셰어링과 같은 온디맨드(on-demand) 서비스 모델의 실증사업을 통해 사업화 가능성을 검토하고 있다.
선진국의 자율주행 기술이 국내 사회적, 산업적, 경제적 측면에서 어떤 유사점이 있는지 분석해보고 고령화, 과소화 등 미래 사회현상이 먼저 시작된 일본의 자율주행 서비스와 정책동향에 대해 알아보기로 한다
자율주행 서비스 기술개발 동향
2018년 닛산자동차와 DeNA는 가나가와현 요코시마시 미나토 미라이 지구 주변에서 새로운 자율택시 서비스인 ‘이지라이드’(Easy Ride)의 실증실험을 시작한다고 발표했다. 이 실험에는 300명 이상의 일반승객이 참여하는 것으로 알려져 있다. 커넥티드 기술을 활용한 이 실험은 전용 모바일 앱에서 목적지를 설정하는 이동서비스 뿐만 아니라, ‘하고 싶은 것’을 텍스트 또는 음성으로 입력하여 추천 목적지를 선택할 수 있다. 해당지역의 상점, 레스토랑 할인쿠폰 및 관련정보를 알려주는 서비스도 함께 제공한다.
이 자율택시 서비스는 안전을 위해 차량의 위치와 상태를 실시간 파악할 수 있는 원격관제센터도 운영하며, 향후 사용자경험 및 운행노선확충, 혼합교통 하에서의 서비스 유효성을 충분히 테스트하여 2020년에 본격적인 서비스를 제공한다는 목표를 세우고 있다.
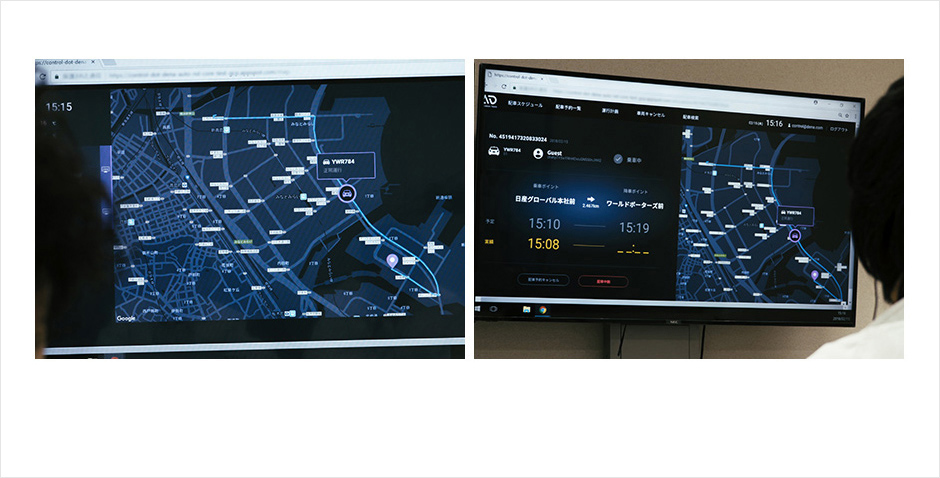
이지라이드는 모니터링 센터를 통해 실시간 교통상황을 한 눈에 파악해 운행에 반영한다
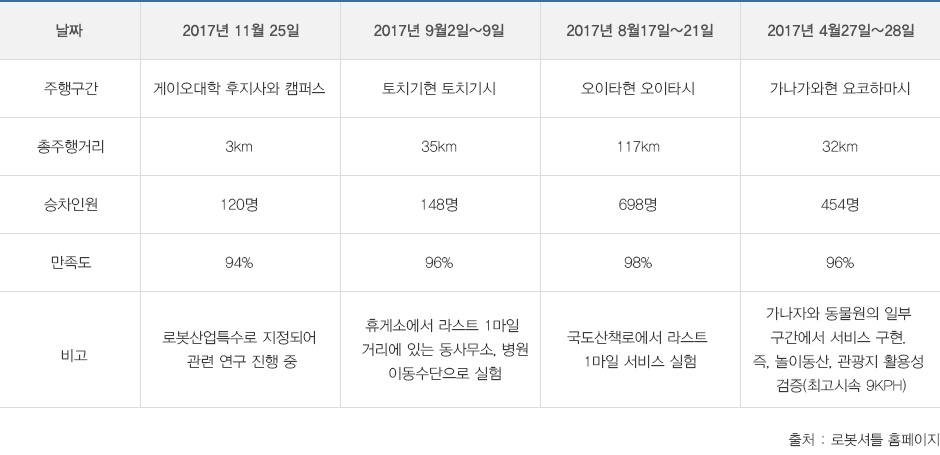
2016년 일본 DeNA는 프랑스의 이지마일(Easymile)과 공동으로 로봇셔틀을 개발하여 도심로, 공원, 대학캠퍼스, 관광지 내에서 시범운행 서비스를 진행 중이다. 커넥티드 기술을 이용하여 카메라 기반 차내 상황 모니터링 및 원격관제센터로 연결되는 비상상황 안전기술을 확보한 것이 특징이다.
이 서비스는 버스운전자의 감소와 고령화 등으로 인한 대중교통 비용 상승을 해결하기 위한 수단으로 로봇셔틀을 제안하고 있는 것이다. DeNA에 따르면 일본 노선버스 운행 경비의 60%가 인건비로 쓰이고 있다.
한편 이 서비스는 라스트 원마일(Last 1 mile ; 도보로는 멀지만 전철이나 버스 등의 대중교통을 이용할 정도는 아닌 거리)의 교통수단으로 적극 활용할 예정이다.
로봇셔틀의 최근 실증실험
일본 정부의 자율주행 서비스 정책
자율주행 서비스와 관련된 일본 정부의 기본방침은 사회문제(교통사고, 과소화, 이동약자 등) 해결을 위한 요구가 많은 지역에서, 안전을 확보하면서 사회적 수용성을 높이고 점점 복잡한 혼합구간(일본도로, 도심)으로 서비스를 확대하는 것이다. 일본 정부는 자율주행 기술이 급변하기 때문에 세계의 기술동향을 면밀히 관찰하면서 기동적이고 유연하게 진행하는 것도 중요하게 바라보고 있다.
일본 내각부에 설치된 「종합과학기술·이노베이션회의」가 주관하는 연구개발 프로그램인 전략 혁신 프로그램(SIP; Strategic Innovation Promotion Program)은 일본 경제나 산업경쟁력 측면에서 중요한 과제로 기초연구부터 실용화, 사업화에 대응하기 위해 만들어졌다. SIP 제 1기는 2014년부터 2018년까지 총 11과제가 연구개발 대상으로 진행된다. 2018년부터 2022년까지의 제 2기에서는 12과제가 연구개발 대상이다.

일본은 도심로와 공원, 대학캠퍼스, 관광지내에서 로봇셔틀을 시범운행 중이다
제 1기에서는 자율주행에 관한 대응으로서 「자율주행시스템」을 테마로 하여, 자율주행에 필요한 지도 인프라의 정비, HMI 개발, 정보 보안의 검토 등을 수행하였다. 특히, 지도 인프라 정비에 대해서는 「다이나믹맵기반주식회사(DMP)」를 설립하는 등 사업화에 공헌하였다.
SIP 제 2기에서는 자율주행의 본격적인 실용화를 위해 실증실험과 기반기술 개발 노력이 더욱 가속화된다. 실증실험은 도시교통과 지역교통 2가지 관점에서 진행된다.
도시교통의 관점에서는 2019년 10월부터 임해부도심이나 하네다 지구의 일반도로와 수도 고속도로를 이용하여 레벨 2~4의 자율주행에 필요하다고 생각되는 신호정보제공과 고속도로 본선 합류지원 등의 요소기능, 자율주행버스라는 어플리케이션의 실증을 수행한다. 지역교통에서는 사업자와 지방자치 단체와의 협동에 의해 장기간 실증을 수행하고 물류나 이동 서비스의 사업성 검토를 한다.
기반기술의 개발은 실증실험과 병행하여 가상공간에서의 안정성 평가환경 구축과 효율적인 데이터 수집·분석·전송 기술의 개발, 소프트웨어 갱신 등에 대응한 보안기술의 개발, 자율주행 고도화에 따른 HMI 요구사항 등 4가지 테마를 축으로 실시된다.
특히, 가상공간에서의 안전성평가환경 구축에서는 자율주행 개발에서 과제가 된 다양한 교통 환경에 있어서의 안전성 검증을 시뮬레이션에 의해 실시할 수 있도록 툴 개발을 산학연계에 의해 수행하게 된다. 실세계의 실증 주행에 의해 취득되는 100억km의 데이터를 활용하여 시뮬레이터 상에서 다양한 교통 환경과 악천후 등의 모든 조건을 조합하여 자율주행 시스템의 안전성을 자동 평가하는 것을 목표로 한다.
국내에도 자율주행 인프라 개발 절실
자율주행은 단순 운전보조 및 자동운전에서 미래 모빌리티 서비스로 발전하고 새로운 먹거리-가치를 창출하기 위해 다양한 융합서비스 사업 모델로 진화하고 있다. 운수업계의 인력 부족과 도심 과소화 현상으로 인해 현재의 공공교통을 유지하는 것이 곤란하기 때문에 향후 자율주행차가 공유 모빌리티 서비스로 이용되어 도심ㆍ교외의 교통소외지 문제의 대안으로 제시될 수 있다.
이에 하루 빨리 자율주행 모빌리티 서비스 사업화 모델을 확보하고, 모빌리티 서비스 사업을 육성하기 위한 인프라 기술개발(차량-ICT-도로)과 더불어 다양한 실증사업을 위한 선제적인 법·제도 개선이 필요하다.
- 김문식
- 자동차부품연구원 자율주행기술연구센터 선임연구원


-
정책동향 01
자율주행 서비스 기술개발 및 정책 동향


-
정책동향 02
자동차안전도평가(KNCAP)의 성과와 추진방향